La detección de viajes nos permite crear los intervalos de movimiento y estacionamientos, es decir, nos permite definir el tiempo de estacionamiento, la distancia y el tiempo mínimo de un viaje.
Debes tener en cuenta que las opciones definidas en esta sección, influyen en la visualización de los informes que dependen de intervalos de movimiento y estacionamientos.
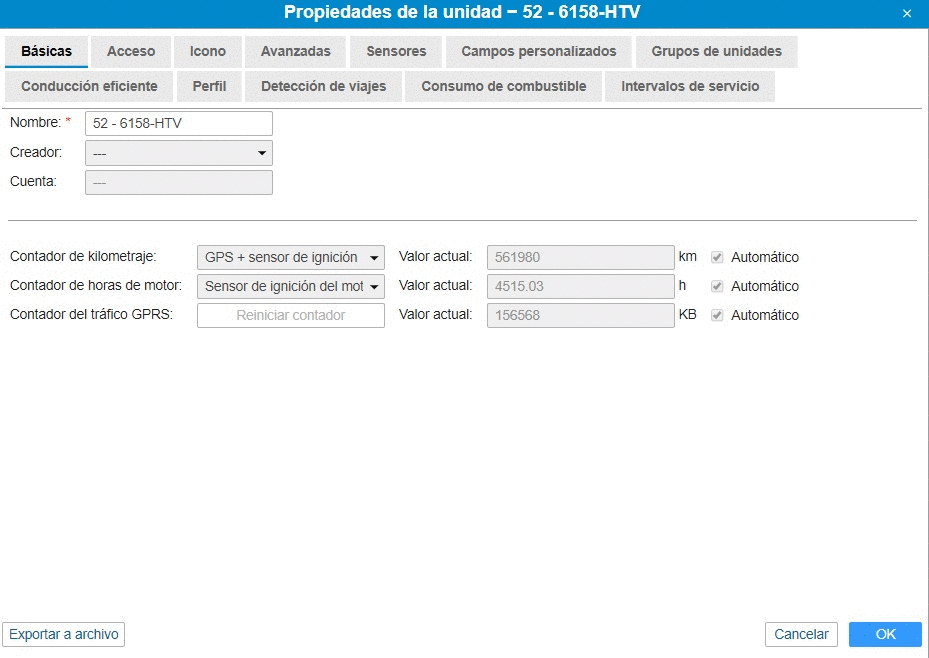
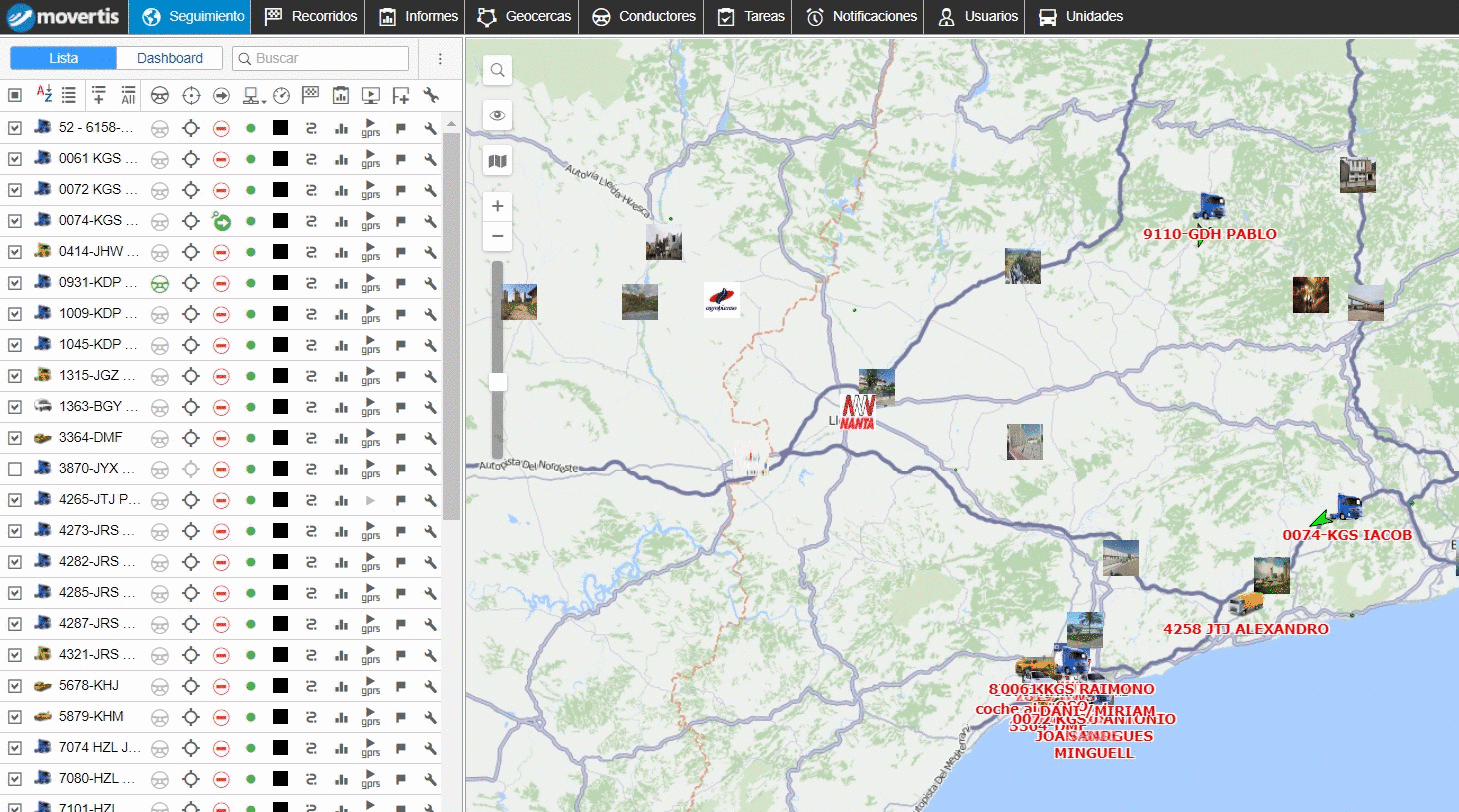
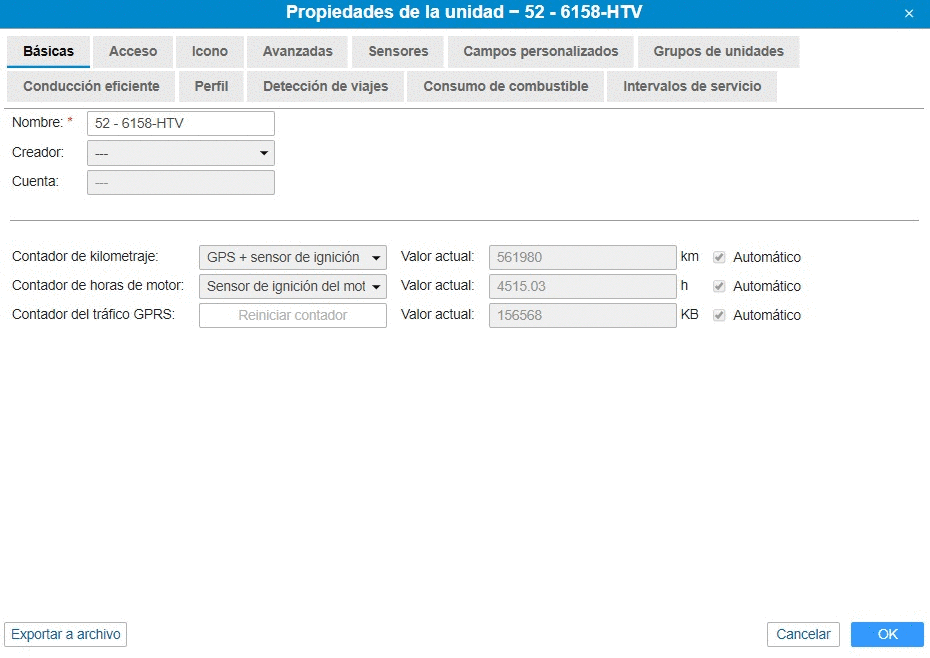
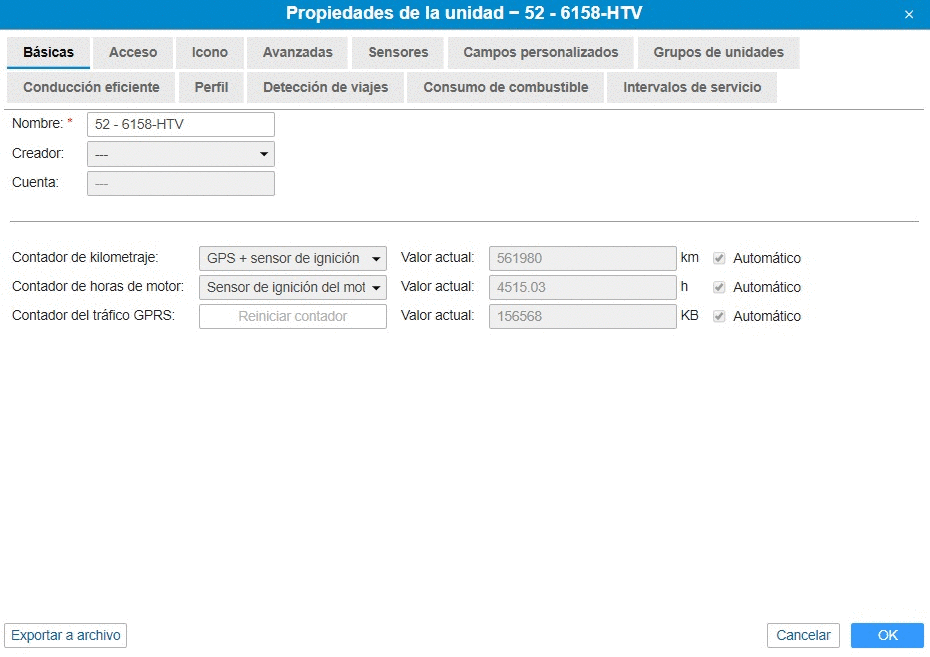
Puedes acceder a la detección de viajes desde el panel superior en el apartado de Unidades o el apartado de Seguimiento. Ahí tienes la opción de la llave inglesa, donde accedes a las propiedades de la unidad.
La detección de viajes nos permite configurar la siguiente información:
- Velocidad mínima de movimiento.
- Duración mínima de estacionamiento.
- Permitir la corrección por GPS.
Establecer la velocidad mínima de movimiento.
Permite indicar la velocidad mínima que deseas considerar como el inicio de movimiento.
Debes tener en cuenta, que la localización de un equipo puede variar y no dar una localización fija cuándo la unidad está parada. Por lo que recomendamos configurar la velocidad mínima de movimiento para excluir la variación de la posición de una unidad.
Ejemplo: Tenemos un vehículo estacionado y, como la posición de localización no es fija, puede desplazarse algunos metros mientras el vehículo no tiene movimiento.
Si establecemos una velocidad mínima de movimiento, evitaremos que se considere un viaje, si no cumple con esa condición de velocidad.
Duración mínima de estacionamiento.
Puedes definir el tiempo en segundos que debe estar parada una unidad para que se considere un estacionamiento y no una parada.
Si durante un viaje, el tiempo detectado por la unidad es superior al configurado en la duración mínima de estacionamiento, el recorrido se divide en dos. Habitualmente y por defecto este parámetro es de 5 minutos, pero puedes valorar el tiempo que deseas que dure el estacionamiento y modificarlo.
Ejemplo: Tenemos configurado la duración mínima del estacionamiento a 5 minutos. Hacemos un viaje de 2 horas y hacemos una parada en una gasolinera de 10 minutos, como el tiempo que hemos parado es superior al valor que hemos configurado de 5 minutos, en los recorridos y los informes te aparece como 2 desplazamientos.
Permitir la corrección por GPS.
Para los primeros dos tipos de detección de movimiento (odómetro relativo y coordenadas GPS), esta opción es obligatoria y viene marcada por defecto. En otros casos la corrección por GPS puede ser activada adicionalmente si el movimiento se detecta según el sensor de ignición del motor.

Esta opción, nos permite configurar los siguientes campos:
- Cantidad mínima de satélites: Esta opción permite configurar los satélites mínimos que necesita recibir la unidad para que los datos se consideren válidos.
- Distancia máxima entre mensajes: Si una unidad se ha movido por una distancia mayor a la indicada en este campo (en metros), desde el mensaje anterior hasta el actual, el intervalo anterior será terminado y será iniciado otro.
- Duración mínima de viaje: Nos permite excluir la información incorrecta de la posición de una unidad en segundos, ya que la localización de una unidad varia aunque el dispositivo esté parado. De esta manera, evitamos que los pequeños movimientos que genera una unidad parada, no se considere un viaje.
- Distancia mínima de viaje: Nos permite indicar una distancia para que no se consideren viajes los movimientos causados por la inexactitud de una unidad.
Otros ajustes que se pueden realizar.
Los ajustes que comentamos a continuación, vienen siempre definidos por el personal de movertis y no deben modificarse, debido a que el funcionamiento del dispositivo instalado en el vehículo depende de esta configuración.
Detección de movimiento.
En este apartado, nos permite configurar el tipo de detector de movimiento.
Hay 5 tipos de detección de movimiento:
- Velocidad GPS: Se puede utilizar para cualquier dispositivo. La detección del movimiento se realiza en los intervalos configurados en el resto de opciones del apartado de detección de movimiento.-Coordenadas GPS: Registra un movimiento si la localización entre dos mensajes sucesivos no es la misma. Esta opción solo se puede utilizar para los dispositivos que solo envían datos de localización.
- Sensor de ignición del motor: Se registra el movimiento cuando se activa el sensor de ignición y recibe un mensaje con una velocidad igual o mayor que la velocidad mínima de movimiento. Solo está disponible si hay un sensor que corresponde a esta opción.
- Sensor de kilometraje: El movimiento se registra cuando el valor del sensor de kilometraje aumenta y recibe un mensaje con una velocidad igual o mayor que la velocidad mínima de movimiento. Este modo solo está disponible si existe el sensor correspondiente.
- Odómetro relativo: Registra la distáncia de un movimiento cuando se recibe un mensaje que sea mayor de cero y una velocidad que sea igual o mayor a la velocidad mínima de movimiento.